
Роботы, которые помогут следить за нами. (ВИДЕО)Интересно и иногда даже забавно наблюдать за достижениями науки и техники. Но возникает ясное ощущение того, что в конечном итоге достижения современных технологий будут использованы против нас, людей. Кроме того, то, что показывается публично в десятки, а иногда и в сотни раз ниже по уровню развития, чем уже имеющиеся у военных и спецслужб.
Виджай Кумар: Роботы, которые летают и работают… вместе
Перевод видеоролика:
Доброе утро. Сегодня я расскажу вам о самоуправляемых летающих пляжных мячах. Шутка. Я расскажу о вот таких быстрых авиароботах. Вы узнаете о проблемах их создания и о некоторых потрясающих возможностях применения этой технологии. Эти роботы — беспилотные летательные аппараты. Однако вот эти транспортные средства довольно большие, весят тысячи килограммов и медленны. Они даже не самоуправляемые. Многие из них управляются командами из нескольких пилотов, операторов аппаратуры и координаторов полёта.
В моих руках робот, созданный двумя студентами — Алексом и Даниэлем. Он весит чуть более нескольких десятков граммов и потребляет около 15 Вт энергии. Как вы можете видеть, он около 20 см в диаметре. Позвольте вкратце рассказать вам, как работают эти роботы.
У робота есть 4 несущих винта. Если они вращаются на одной скорости, робот парит в воздухе. Если вы увеличиваете скорость каждого винта, робот ускоряется и летит вверх. Естественно, если робот был наклонён по отношению к горизонту, ускорение будет происходить в этом направлении. Есть 2 способа его наклонить. На этом изображении видно, что винт №4 вращается быстрее, а винт №2 вращается медленнее. Именно это создаёт момент, при котором робот наклоняется. Второй способ таков: увеличиваем скорость вращения винта №3 и уменьшаем скорость вращения винта №1, и робот наклоняется вперёд.
Наконец, если вы вращаете одну противоположную пару винтов с большей скоростью, чем другую, робот вращается по вертикальной оси. Встроенный в робот процессор определяет, какие движения надо выполнить, сопоставляет эти движения и решает, какие команды отправить на винты, посылая 600 команд в секунду. Вот как это работает.
Одно из преимуществ этой модели — её естественная быстрота при уменьшении размеров. R на этом изображении — характерная длина робота. Это половина его диаметра. Множество физических параметров изменяются при уменьшении R. Самый главный из них — это инерция или сопротивление движению. Оказывается, что инерция, регулирующая угловое движение, пропорциональна R в пятой степени. Уменьшая R, мы значительно уменьшаем и инерцию. Угловое ускорение, обозначенное греческой буквой альфа, рассчитывается по формуле 1/R. Оно обратно пропорционально R. Чем оно меньше, тем быстрее вы можете вращаться.
Вот видео, демонстрирующее этот процесс. Внизу справа вы видите робота, выполняющего переворот на 360° менее чем за полсекунды. Несколько переворотов — чуть больше времени. Встроенные процессоры получают информацию от датчиков ускорения и гироскопов на борту. Как я уже сказал, они рассчитывают и посылают 600 команд в секунду, чтобы поддержать устойчивость робота. Слева вы видите, как Даниэль подбрасывает робота в воздух. Посмотрите, насколько надёжен его контроль. Независимо от того, как вы его бросаете, роботу удаётся вернуться в исходное положение.
Чтобы быть самоуправляющимся, роботу необходимо решить одну из ключевых проблем, а именно — понять, как добраться из точки А в точку Б. Это совсем не простая задача, поскольку динамика этого робота довольно сложна. Эти роботы живут в 12-мерном пространстве. Мы пошли на маленькую хитрость: взяли изогнутое 12-мерное пространство и преобразили его в плоское 4-мерное пространство. 4-мерное пространство состоит из X, Y, Z и угла рыскания.
Задача робота — спланировать минимальную и быструю траекторию. Напомню вам физику: существуют производные позиции — скорость, затем ускорение, а потом рывок и толчок. Робот минимизирует эффект толчка и таким образом делает движения гладкими и изящными. Он также избегает препятствия. Минимальные траектории в плоском пространстве затем преобразуются обратно в сложное 12-мерное пространство, которым робот должен владеть для контроля и выполнения задач.
Позвольте показать вам, как выглядят эти минимальные траектории. В первом видео вы видите, как робот движется из точки А в точку Б через промежуточную точку. Роботы, естественно, способны выполнять любые кривые траектории. В этих круговых траекториях ускорение робота равно почти двум g. На борту есть камеры захвата движения, сообщающие роботу его местоположение 100 раз в секунду. Они также указывают ему на препятствия. Препятствия могут перемещаться. Посмотрите, Даниэль подбрасывает обруч, робот рассчитывает положение обруча и вычисляет, как лучше преодолеть его. Учёные часто из кожи вон лезут, добиваясь финансирования своих лабораторий. Поэтому и наши роботы умеют это делать.
(Аплодисменты)
Сменим тему. Одним из недостатков маленьких роботов является их размер. Как я уже отметил, нам может понадобиться множество роботов для решения этой проблемы. Возникает вопрос: как скоординировать их работу? Мы воспользовались примером из природы. В этом видео пустынные муравьи Aphaenogaster переносят объект в лаборатории Стивена Прата. Это кусок фигового дерева. Можете дать им любой объект, покрытый соком инжира, и они отнесут его в муравейник. Эти муравьи не имеют центрального координатора. Они ощущают своих соседей без явной передачи информации. Поскольку они ощущают соседей и ощущают сам объект, в группе происходит неявная координация.
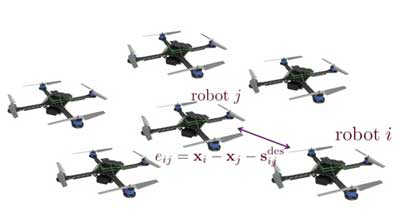
Мы бы хотели, чтобы наши роботы имели именно такую согласованность. Когда у нас есть робот, окружённый соседями — взгляните на роботов I и J — мы хотим, чтобы роботы следили за расстоянием между собой при полёте в строю. Нужно убедиться, что расстояние между ними достаточное. Опять же, роботы отслеживают погрешность и рассчитывают управляющие команды 100 раз в секунду, переводя их затем в 600 моторных команд в секунду. Это должно быть сделано в децентрализованном порядке. Если у вас много роботов, невозможно централизованно скоординировать информацию настолько быстро, чтобы роботы смогли выполнить задачу. К тому же, действия роботов зависят только от местной информации, от их ощущения соседей. Наконец, мы хотим, чтобы роботам было всё равно, кто является их соседом. Именно это мы называем анонимностью.
Сейчас я покажу вам видео 20-ти роботов, выполняющих полёт в строю. Они отслеживают позицию соседей. Они не нарушают строй, даже если их порядок меняется. Структура может быть как плоской, так и трёхмерной. Вы можете видеть, они переходят от трёхмерной структуры к плоской. Для преодоления препятствия роботы адаптируются на лету. Они расположены очень близко друг к другу. При выполнении «восьмёрки», они пролетают в нескольких сантиметрах друг от друга. Несмотря на аэродинамическое взаимодействие их лопастей, они поддерживают стабильный полёт.
(Аплодисменты)
Хочу показать вам ещё одну работу нашей лаборатории. Это работа аспиранта Квентина Линдси. Созданный им алгоритм говорит роботам, как самостоятельно строить кубообразные структуры из таких элементов, как балки. Алгоритм сообщает роботу, какую балку взять, где и когда её опустить. Из этого видео, ускоренного в 10 и в 14 раз, видно, как роботы строят 3 разные конструкции. Они полностью автономны, Квентин должен всего лишь дать им план конструкции, которую он хочет построить.
Все увиденные вами эксперименты, все наглядные представления были сделаны с помощью системы захвата движения. Что же происходит, если мы покидаем лабораторию и выходим на улицу, в реальный мир? Как быть, если нет GPS? Этот робот оснащён камерой и лазерным дальномером, лазерным сканирующим устройством. Он использует датчики для построения карты окружающей среды. Карта состоит из таких объектов, как двери, окна, люди, мебель. Она также определяет положение робота по отношению к этим объектам. Это не глобальная система координат. Это система координат, определённая роботом, его положением и ориентацией в пространстве. Он двигается согласно этим показателям.
Хочу показать вам видео алгоритмов, разработанных Франком Шеном и профессором Натаном Майклом. Здесь видно, как робот впервые попадает в здание и на лету создаёт карту местности. Робот определяет объекты вокруг. Он создаёт карту и определяет своё положение по отношению к объектам; он обновляет своё положение 100 раз в секунду, что позволяет нам использовать алгоритмы управления, о которых я вам уже рассказал. Этот робот дистанционно управлялся Франком. Но он также мог решать сам, куда направиться. Предположим, меня отправили исследовать незнакомое мне здание. Я могу заслать туда робота, который создаст карту и сообщит мне, как выглядит здание. Здесь робот не только определяет, как добраться из точки А в точку Б по карте, но также вычисляет лучшую точку Б в каждый момент времени. Он знает, куда направиться для поиска слабоизученных мест. Вот как он заполняет карту.
Напоследок расскажу вам ещё об одном приложении. У него есть много сфер применения. Я профессор, и мы увлечены образованием. Такие роботы могут значительно изменить наше среднее образование. Но мы сейчас в Южной Калифорнии, близко к Лос-Анджелесу, поэтому я должен закончить чем-то из области развлечений. Хочу закончить этим музыкальным видео. Представляю вам Алекса и Даниэля, его создателей.
(Аплодисменты)
Перед просмотром хочу сказать, что они создали его за 3 дня, после того, как им позвонил Крис. Роботы в этом видео полностью самоуправляемы. 9 роботов будут играть на 6-ти музыкальных инструментах. Это сделано специально для TED 2012. Давайте посмотрим. |




ПОПУЛЯРНОЕ ВЧЕРА ОБСУЖДАЮТ
МЫШЕЛОВКА ЗАХЛОПНУЛАСЬ? УЭК (БИОМЕТРИЧЕСКИЙ ПАСПОРТ) – ОКОНЧАТЕЛЬНОЕ ОТРЕЧЕНИЕ ОТ ХРИСТА, ДАЛЕЕ – ЗОМБИРОВАНИЕ И ПЕЧАТЬ
Главные новости / Публикации / Православие / Глобализация / Апостасия / Апокалипсис / Эл.концлагерь / УЭК | 20 августа 2012
0
1 122 046
Позитивчик. Животинки, которые отказываются верить, что их не берут с собой. (ФОТО)
15 июля 2026
0
36 738
|
19 апреля 2012
Просмотров: 4 652
|
 Мы заинтересованы в разработке роботов, которые вы сможете купить в магазине — вот ещё несколько изображений. Это вертолёты с четырьмя несущими винтами. Их длина составляет около метра, а вес — несколько килограммов. Мы устанавливаем датчики и процессоры, и роботы обретают возможность летать в помещении без GPS.
Мы заинтересованы в разработке роботов, которые вы сможете купить в магазине — вот ещё несколько изображений. Это вертолёты с четырьмя несущими винтами. Их длина составляет около метра, а вес — несколько килограммов. Мы устанавливаем датчики и процессоры, и роботы обретают возможность летать в помещении без GPS.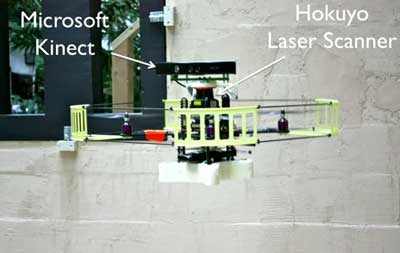 Для чего нужны такие роботы? У них много областей применения. Мы можем заслать их в здания для поиска злоумышленников, обнаружения биохимических или газообразных утечек. Их можно также использовать в строительстве объектов. Вот роботы, переносящие балки, колонны и создающие кубообразные структуры. Чуть позже я вернусь к этому. Роботов можно использовать для переводки грузов. Недостатком этих маленьких роботов является их полезная грузоподъёмность. Поэтому вам могут понадобиться несколько роботов для работы. Вот недавно проведённый нами эксперимент, хотя он не такой уж и недавний. Это было в Сендае сразу после землетрясения. Роботы могут быть отправлены в разрушенные здания для оценки ущерба после стихийных бедствий; или посланы в заражённые радиацией здания для определения уровня радиации.
Для чего нужны такие роботы? У них много областей применения. Мы можем заслать их в здания для поиска злоумышленников, обнаружения биохимических или газообразных утечек. Их можно также использовать в строительстве объектов. Вот роботы, переносящие балки, колонны и создающие кубообразные структуры. Чуть позже я вернусь к этому. Роботов можно использовать для переводки грузов. Недостатком этих маленьких роботов является их полезная грузоподъёмность. Поэтому вам могут понадобиться несколько роботов для работы. Вот недавно проведённый нами эксперимент, хотя он не такой уж и недавний. Это было в Сендае сразу после землетрясения. Роботы могут быть отправлены в разрушенные здания для оценки ущерба после стихийных бедствий; или посланы в заражённые радиацией здания для определения уровня радиации. Ещё робот может запоминать заученные или запрограммированные части траектории. Здесь мы видим, как робот сочетает движение, создающее импульс, меняет ориентацию и затем обретает равновесие. Это нужно, потому что проём окна лишь немного шире робота. Ныряльщик на трамплине отталкивается от него, чтобы набрать движущую силу, делает пируэт в два с половиной оборота и затем изящно выпрямляется. По сути, наш робот делает то же самое. Робот знает, как соотнести части траекторий для выполнения сложных задач.
Ещё робот может запоминать заученные или запрограммированные части траектории. Здесь мы видим, как робот сочетает движение, создающее импульс, меняет ориентацию и затем обретает равновесие. Это нужно, потому что проём окна лишь немного шире робота. Ныряльщик на трамплине отталкивается от него, чтобы набрать движущую силу, делает пируэт в два с половиной оборота и затем изящно выпрямляется. По сути, наш робот делает то же самое. Робот знает, как соотнести части траекторий для выполнения сложных задач.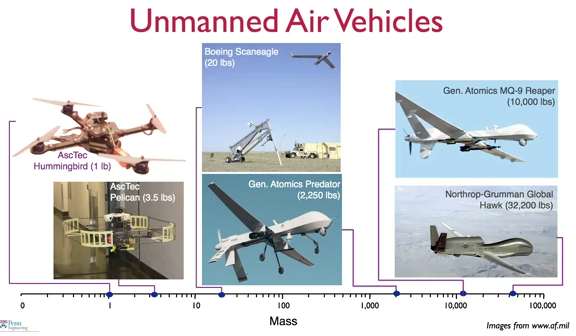 Если роботы умеют летать в строю, они могут и поднимать объекты сообща. Это означает, что мы можем увеличить в 2, 3 или 4 раза силу роботов, заставляя их объединяться с соседями, как вот здесь. Но если мы утяжеляем переносимые предметы, появляются некоторые недостатки: объект несут несколько роботов, поэтому увеличивается инерция, и роботы становятся менее быстрыми — такой исход неизбежен. Но мы выигрываем в плане полезной грузоподъёмности.
Если роботы умеют летать в строю, они могут и поднимать объекты сообща. Это означает, что мы можем увеличить в 2, 3 или 4 раза силу роботов, заставляя их объединяться с соседями, как вот здесь. Но если мы утяжеляем переносимые предметы, появляются некоторые недостатки: объект несут несколько роботов, поэтому увеличивается инерция, и роботы становятся менее быстрыми — такой исход неизбежен. Но мы выигрываем в плане полезной грузоподъёмности.
Православный портал "МОСКВА - ТРЕТИЙ РИМ"
Copyrights © 2009-2026 гг.

Copyrights © 2009-2026 гг.